デュアルポートEthernet搭載。※
超小型PLC「FP0H」による、情報化・分散制御を実現!
※IPアドレスは1つです。
UL 、CE を取得しています。
CE : マーキング適合
UL : TÜVラインランドによる認証(NRTL認証)
|

|
ファンクションブロックはWebサイトよりダウンロードできます。
|
特長
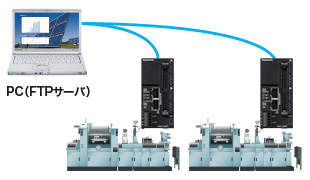
FTPサーバ機能(SSL/TLS対応)
SDメモリカード内のロギングデータ読み出し、設定値などのパラメータファイルの書き込みが可能。
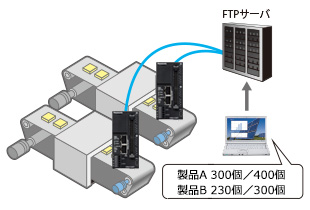
FTPクライアント機能(SSL/TLS対応)
FP0H内で発生したタイミングでパソコン(FTPサーバ)へデータ・ファイルの書き込み、読み出しが可能。
|

|
ファイル形式での
複数台のデータ収集、
閲覧、データ書き込み
|
|
工場やオフィスの各種電力データをFTPサーバへ定期的に転送。
|
 |
| |
|
|
生産情報をサーバに蓄積、任意のタイミングで確認可能。
|
 |
| |
|
|
高速演算処理 [従来比8倍の高速!]
基本命令:10ns~ (10kステップまで)
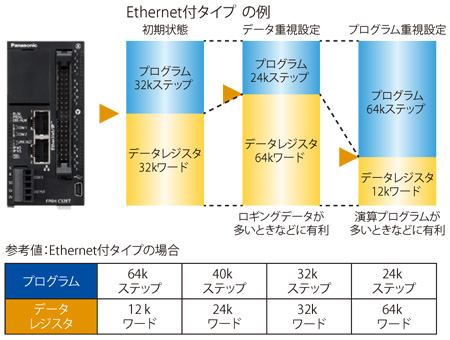
高容量最大 64kステップ [従来比2倍!]
プログラム容量:64k/40k/32k/24k ステップ可変
データ容量:12k/24k/32k/64k ステップ可変
|
|
| I/O: |
入力16点、出力16点 トランジスタ出力(NPN / PNP) |
| 内蔵I/F: |
Ethernet×2ポート、RS-232C×1ch、USB×1ch |
| 拡張I/F: |
FP0H / FPΣ増設バス×1、FP0R増設バス×1
カセットスロット×1(RS-232C、RS-232C×2、RS-485、RS-232C + RS-485) |
| ツール: |
FPWIN GR7 / FPWIN Pro7 |
最大I/O点数384点、FP0H / FPΣ / FP0Rのユニットを増設可能
必要な機能を選択しさまざまな機器を制御!
|
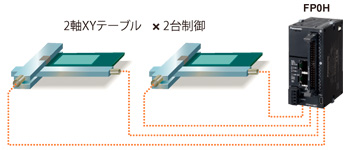
内蔵4軸パルス出力
パルス出力を4軸内蔵していますので、2軸直線補間を同時に2組制御可能です。例えばXYテーブル2台の制御も可能です。
|
 |
|
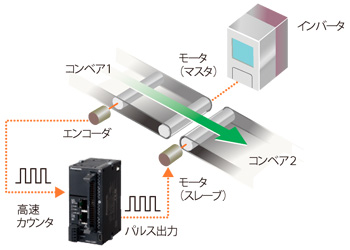
高速カウンタ入力+パルス出力
ラダープログラムを組み合わせて、エンコーダからのパルス信号を高速カウンタ入力で計測し、それに従ってパルス出力の周波数を調整することで、マスタ軸に対するスレーブ軸の速度同期を行なうアプリケーションの構築も可能です。
|
右図では、インバータで制御されるコンベア1の速度をエンコーダパルスのカウントにて計測し、その速度に合わせたパルス出力(JOG運転)をモータ(スレーブ)に行ない、コンベア2の速度を同期させています。
|
|
多点PWM出力(4ch)内蔵
FP0Hでは、パルス出力ポートをPWM出力ポートとしても使用可能です。
応用例として、アナログ電圧出力としてもご利用いただけ、インバータの速度制御などを行なうことが可能です。
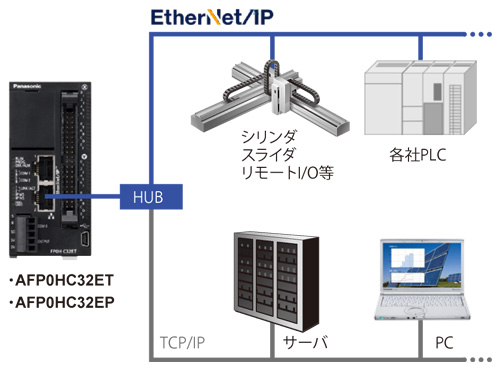
■ EtherNet/IP、Modbus-TCP、MCプロトコル対応※
■ 各種ロボットやPLCと簡単接続※
■ カセット方式により、ユニットのコストと設置スペース削減
※:Ethernet付タイプのみ。
|
EtherNet/IPに対応
Ethernet付タイプコントロールユニットは、EtherNet/IPに対応。
各種ロボットやPLCと簡単に接続し制御や通信を行なえます。
(注):EtherNet/IPは、ODVAの商標です。
|
 |
|
|
カセット方式により、ユニットのコストと設置スペースを削減。
コントロールユニットに簡単、低コストでシリアル通信機能を拡張できます。
|
 |
|
■ SDメモリカードスロット内蔵。ロギング・トレース機能搭載※
■ プロジェクトコピー機能でPCレスでラダーデータコピー可能※
■ データ容量を可変式にすることで、容量不足をカバー。
■ プログラム容量最大64kステップ※
※:Ethernet付タイプのみ。
|
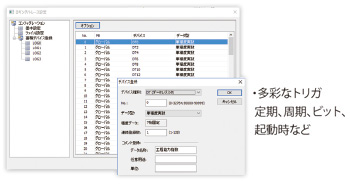
簡単・複数同時ロギング
ロギングの設定は、コンフィグレーション画面で設定できます。
また、4ファイルまで同時に実行できます。
|
 |
|
|
データ容量をシェアし、容量不足をカバー。
高価な上位機種への買い替えが不要に。
|
 |
|
SDメモリカードでプログラムの更新が可能
SDメモリカード内にプログラムを保存し、読み出しが可能。
SDメモリカード経由でプログラムの更新が簡単に行なえます。
※:Ethernet付タイプのみ。
コントロールユニットにパルス出力4軸内蔵(各軸最大100kHz) [コントロールユニット]
専用設定ツールで設定した位置決め動作パターンを起動するだけで簡単に位置決め制御が可能
|
位置制御の設定
位置決めテーブル(注1)および各軸パラメータ(注2)を設定します。
|
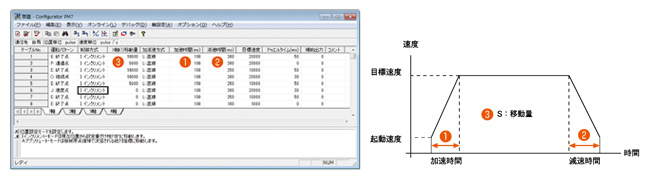 |
| (注1): |
位置決めテーブルは、移動量、目標速度、加・減速時間、運転モード等の個々の位置制御動作の情報を指します。 |
| (注2): |
各軸パラメータは、JOG運転および原点復帰の運転条件、リミット入力論理、停止時の減速時間等を指します。 |
|
|
位置決めユニット(高速立ち上がり5μs)で超高速のリニアサーボにも対応可能 [増設ユニット]
パルス出力最大 4Mpps、高速起動 5μs でリニアサーボも制御可能
電子部品のパレタイジングなど、ショートストローク動作を高速で繰り返し行なうアプリケーションに最適です。
高速カウンタも搭載しているので異常検知が可能
位置決め運転時にエンコーダなどのフィードバックパルスをカウントさせることにより、駆動系の異常など不慮の事故の検知に利用することができます。
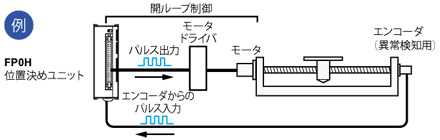 |
| エンコーダからのフィードバックパルスをカウントし、異常検知に使用。 |
|
JOG位置決め機能で定寸送りにも対応
高速起動・繰り返し制御で定寸送り加工用途にも対応できます。
位置決めRTEXユニットで、パナソニック ACサーボモータを制御 [増設ユニット]
位置決めRTEXユニット AFP0HM4N(4軸タイプ)/AFP0HM8N(8軸タイプ)
高速ネットワークを使ったモーション制御からオープンネットワーク対応まで小型PLCで実現
|
ネットワークサーボアンプMINAS A5N/A6Nに対応
配線工数を大幅に削減します。
最大軸数は16軸。8軸ユニットを2台まで装着可能
※同期制御
4軸タイプ:仮想軸含め6軸まで(仮想軸:2軸)
8軸タイプ:仮想軸含め8軸まで(仮想軸:2軸)
充実のモーション機能
[多軸同期制御]
- 電子ギア
マスタ軸とスレーブ軸の速度の比率を変更する機能
- 電子クラッチ
電子ギアの出力に対して、クラッチの接続をする機能
- 電子カム
マスタ軸の動作と設定したカムパターンからスレーブ軸の移動量を決定し、出力する機能
|

|
[補間制御]