Built-in dual Ethernet ports
Multiple interfaces that connect with various devices
UL , CE Approved
UL : Certified by TÜV Rheinland (NRTL)
|

|
Function blocks are available for download.
|
Features
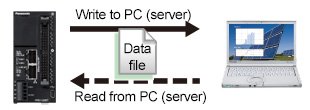
FTP server function (SSL/TLS-compatible)
Allows the PC to read the logging data in the FP0H's SD memory card and to write setting values and other parameters.
FTP client function (SSL/TLS-compatible)
The FP0H can generate and write data files to an FTP server on a PC as well as read data files from the FTP server.
|
|
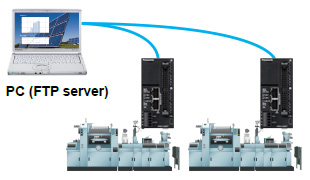
Data collection,
data viewing and
data writing from
multiple units in
the form of files
|
|
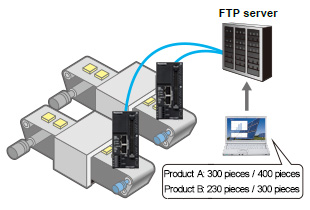
Transfer electric power data from factories and offices to an FTP server on a regular basis.
|
 |
| |
|
|
Users can access the accumulating production information in the server at any time.
|
 |
| |
|
|
High-speed operation processing [8 x faster than conventional models!]
Basic instruction: 10 ns to (up to 10 k steps)
High capacity Max. 64 k steps [2 x larger than conventional models!]
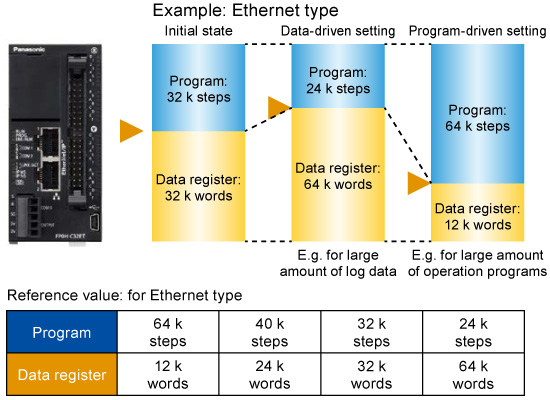
Program capacity: 64 k / 40 k / 32 k / 24 k Step variable
Data capacity: 12 k / 24 k / 32 k / 64 k Step variable
|

|
| I/O: |
16 input points, 16 output points, Transistor output (NPN / PNP) |
| Built-in I/F: |
Ethernet × 2 ports, RS232C × 1 channel, USB × 1 channel |
| Expansion I/F: |
FP0H / FPΣ expansion bus × 1, FP0R expansion bus × 1
Cassette slot × 1 (RS232C, RS232C × 2, RS485, RS232C and RS485) |
| Tool: |
FPWIN GR7 / FPWIN Pro7 |
Up to 384 I/O points FP0H / FPΣ / FP0R units can be added.
Can select required functions to control various devices!
|
Built-in 4-axis pulse outputs
Built-in 4-axis pulse output, so simultaneous control of 2-axis linear interpolation is possible for two sets. For example, two X-Y tables can be controlled.
|
 |
|
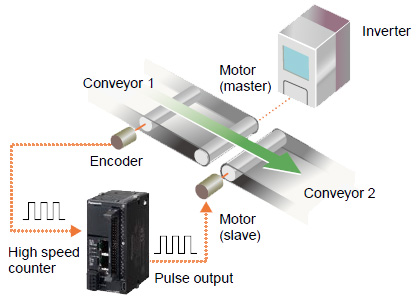
High-speed counter input and pulse output
Ladder programs can be combined to create an application for counting pulse signals from the encoder through the high speed counter input and adjusting the pulse output frequency based on the count to synchronize the slave axis speed with the master axis speed.
|
In the lower figure, the speed of conveyor 1, which is inverter controlled, is measured based on the encoder pulse count, and pulses are output (for jog operation) to the motor (slave) according to the measured speed in order to synchronize the speed of conveyor 2.
|
 |
|
Built-in multipoint PWM outputs (4 channels)
The pulse output port of FP0H can also serve as a PWM output port. One of the application examples is an analog voltage output, which can be used for inverter speed control.
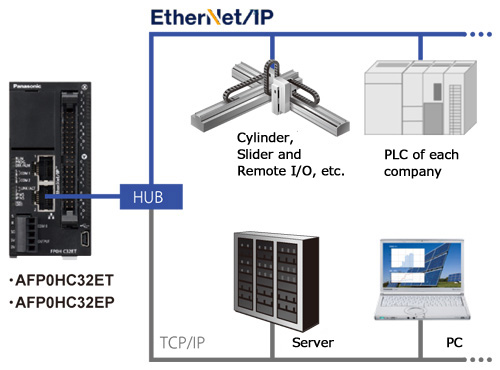
■ EtherNet/IP, Modbus-TCP and MC protocol compatibility*
■ Easy connection with all kinds of robots and PLCs*
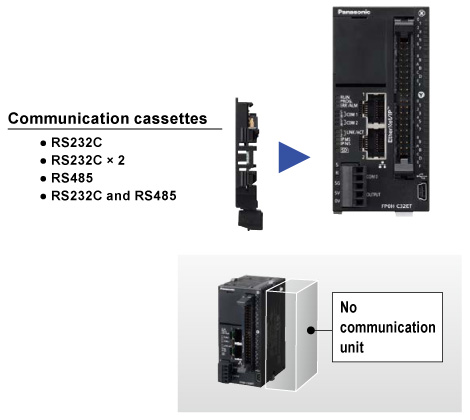
■ Cassette system reduces unit cost and installation space
* Only for Ethernet type
|
EtherNet/IP compatibility
An Ethernet type control unit supports EtherNet/IP.
Easy connection with all kinds of robots and PLCs enables control and communication.
Note: EtherNet/IP is a trademark of ODVA, Inc.
|
 |
|
|
Cassette system reduces unit cost and installation space
With ease and at low cost, extend the serial communication functionality of control unit.
|
 |
|
■ An SD memory card slot and a logging trace function are provided.*
■ A project copy function can copy ladder data without a PC.*
■ Variable data capacity handles capacity shortage.
■ Program capacity: Max. 64 k steps*
* Only for Ethernet type
|
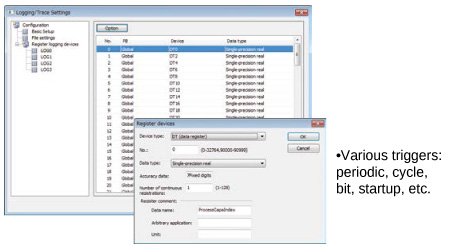
Easy multiple concurrent logging
Logging set up is done via the configuration screen.
Moreover, it is possible to keep up to 4 files concurrently active.
|
 |
|
|
Use program and data register sharing to resolve data space shortage.
No need repurchase expensive upgrade models.
|
 |
|
|
Can update programs with an SD memory card
Can save programs in and read them from an SD memory card.
Programs can be updated easily via an SD memory card.
|
 |
|
The control unit controls four axes with pulse output (up to 100 kHz per axis).
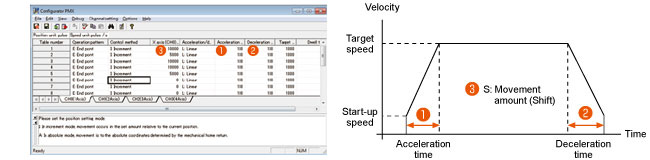
You can achieve position control easily only by starting a positioning action pattern configured with a dedicated setting tool.
|
Positioning control configuration
The positioning table (Note 1) and parameters for each axis (Note 2) are set.
|
 |
|
Notes:
| 1) |
The positioning table separately shows movement amount, target speed, acceleration and deceleration time, operation mode, and other information for positing control operations. |
| 2) |
For each axis parameters are shown for limit input logic, deceleration time to stop, and operation conditions for JOG operation and return to point, etc. |
|
|
The positioning unit (fast start-up in 5 μs) can support ultra-fast linear servos.
Pulse output of up to 4 Mpps and fast start-up in 5 μs can control linear servos.
Ideal for applications that repeat short-stroke actions quickly, such as palletizing of electronics parts
A built-in high speed counter can detect abnormalities.
Counting feedback pulses from encoders during positioning can detect accidents such as the abnormalities in the drive system.
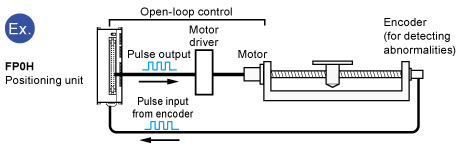 |
| Counts feedback pulses from the encoder to detect abnormalities. |
|
Jog positioning supports fixed feed
Fast start-up and repetitive control can support fixed-feed processing.
The supported positioning unit RTEX can control Panasonic AC Servo Motors.
 Positioning RTEX units AFP0HM4N(4-axis type) / AFP0HM8N(8-axis type)
Positioning RTEX units AFP0HM4N(4-axis type) / AFP0HM8N(8-axis type)
Capable of performing motion control through a high-speed network and supporting an open network with a small PLC
|
Support of network servo drivers MINAS A5N/A6N signifi cantly reduces the man-hours in wiring.
A maximum of 16 axes. Up to two 8-axis units can be installed.
* Synchronous control
4-axis type:
Up to six axes including virtual axes (virtual axis: 2 axes)
8-axis type:
Up to eight axes including virtual axes
Full suite of motion functions
[Multi-axis synchronous control]
- Electronic gear
The electronic gear function changes the master axis and slave axis speed ratio.
- Electronic clutch
The electronic clutch function is used to engage the clutch.
- Electronic cam
The electronic cam function determines and outputs the movement amount of the slave axis according to the operation of the master axis and cam pattern.
|

|
[Interpolation control]